LightLoc Learning Outdoor LiDAR Localization at Light Speed
任务背景
LiDAR Localization
- LiDAR定位:通过激光雷达(LiDAR)点云数据,实时确定设备在环境中的6自由度位姿( 6-DoF pose )。简单来说就是让系统感知“我在世界中的哪个位置、面向哪个方向
- 是自动驾驶、无人机、机器人等系统的核心任务
- 传统方法基于预构建3D地图(Map-based Methods),通过把当前查询点和地图匹配来估计位置
- 存储成本
- 通信开销
因此,越来越多研究希望用深度学习方法“记住场景”,在推理过程中,这些方法消除了对预构建地图的需求,从而降低了存储和通信要求。它们不再依赖地图,而是用深度网络学习,更适合部署在自动驾驶、机器人等设备上。
用深度学习替代地图 →通过网络记住特定场景
Regression-based Methods
| 方法类型 | 回归内容 | 优点 | 缺点 | 代表方法 |
|---|---|---|---|---|
| APR(Absolute Pose Regression) | 直接从输入点云回归位置与朝向 | 快速端到端 | 精度较差 | PointLoc, PosePN |
| SCR(Scene Coordinate Regression) | 预测点和世界坐标的对应关系 再用RANSAC求位姿 | 精度高、鲁棒 | 训练耗时 | SGLoc, LiSA, LightLoc |
Challenge
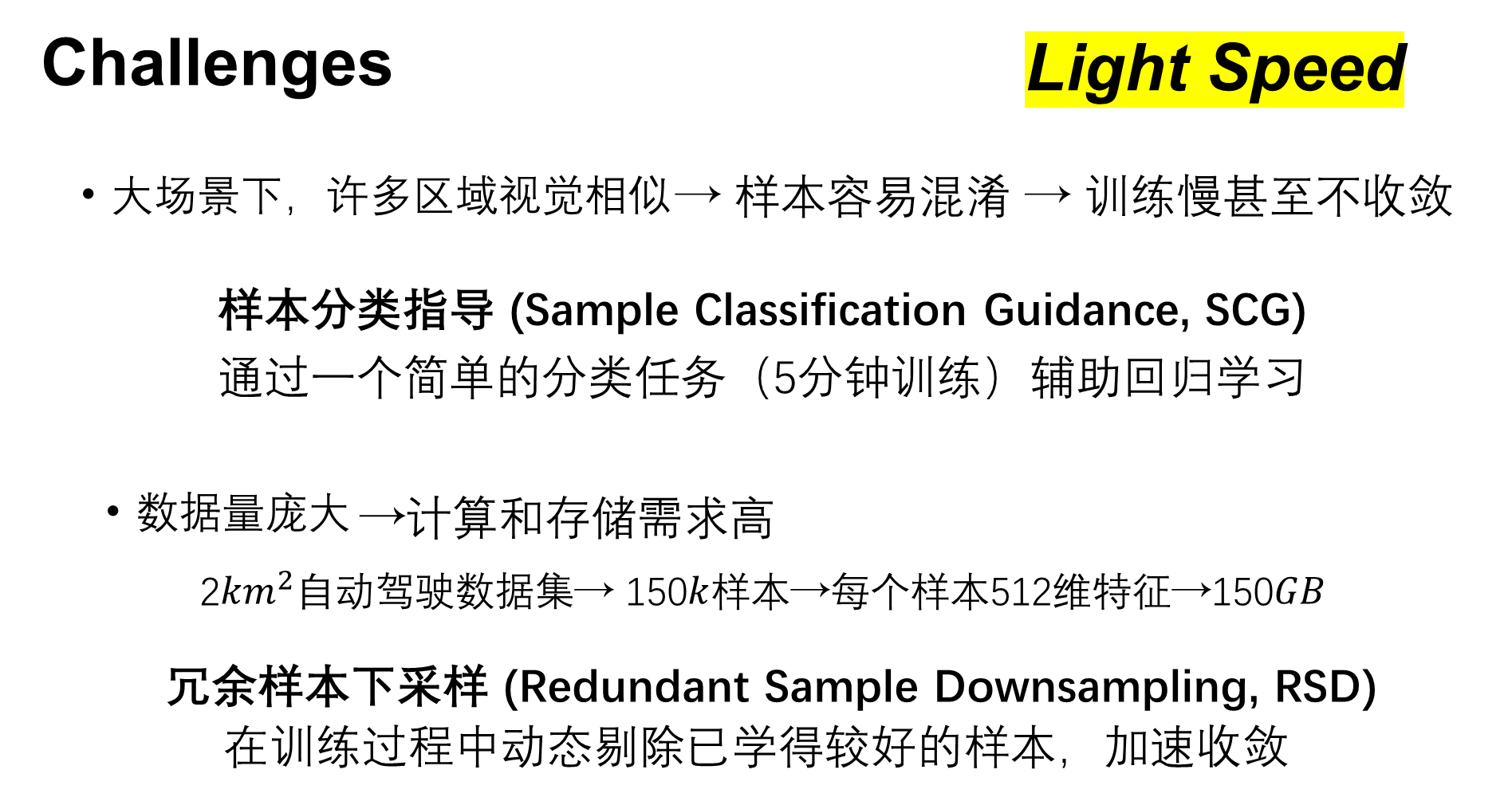
首先,大范围户外场景中,许多位置的点云非常相似。使得回归模型很难区分,这会导致模型训练很慢,甚至不收敛。LightLoc通过构建一个快速训练的分类网络,将这些相似样本区分开来,指导回归任务,提升效率。
其次,数据量大,这导致了大量的计算和存储需求。LightLoc设计了一个冗余样本下采样算法(RSD),把那些“模型已经学会了”的样本移除,专注训练困难样本,从而节省大量训练时间。
LightLoc
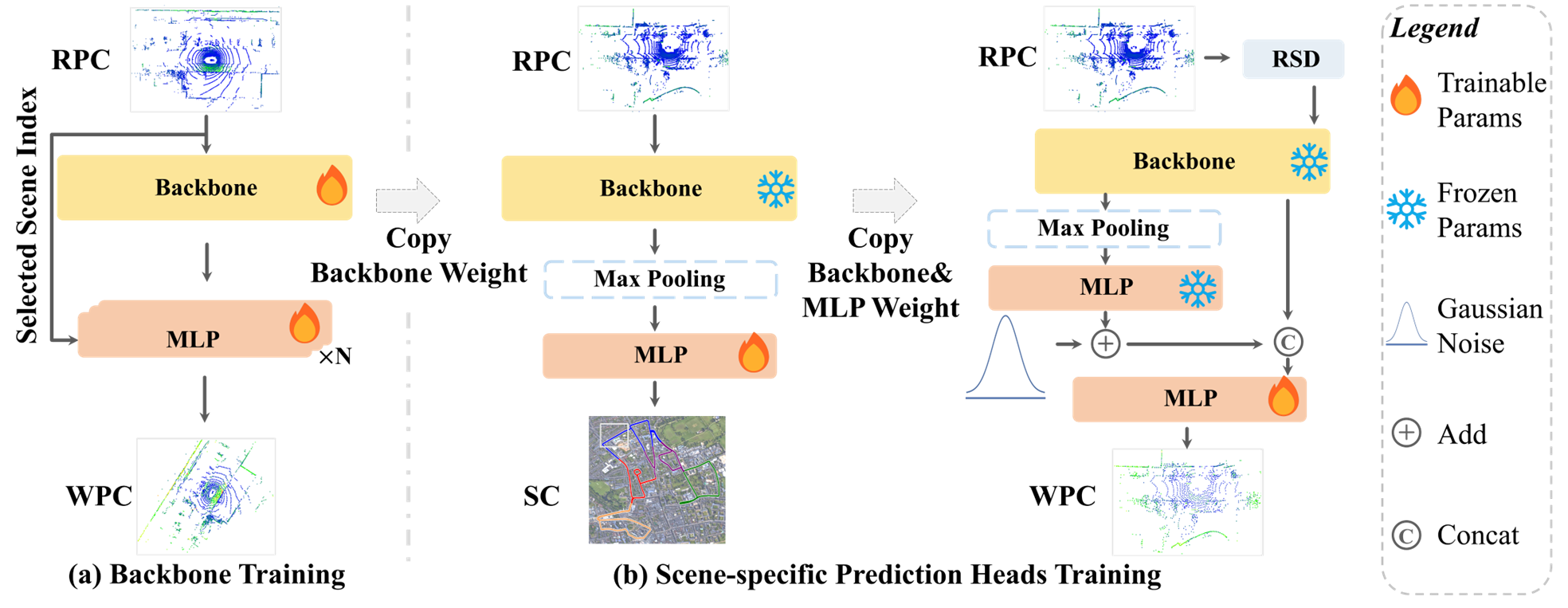
LightLoc的整体框架由两部分组成:
- 右边a部分训练一个通用的“Backbone” 这里用了很多不同的场景数据一起训练,目的是让这个主干网络学到尽可能通用的特征表示,不管以后遇到什么场景,应用都能提取出有用的特征。
- 右边b部分是针对新场景的训练。我们把前面训练好的、通用的主干网络参数冻结住,不再更新,然后只训练一个新的、专门针对当前场景的预测头。 这个阶段引I入了我们刚才提到的两个技术:SCG和RSD。
Backbone Training
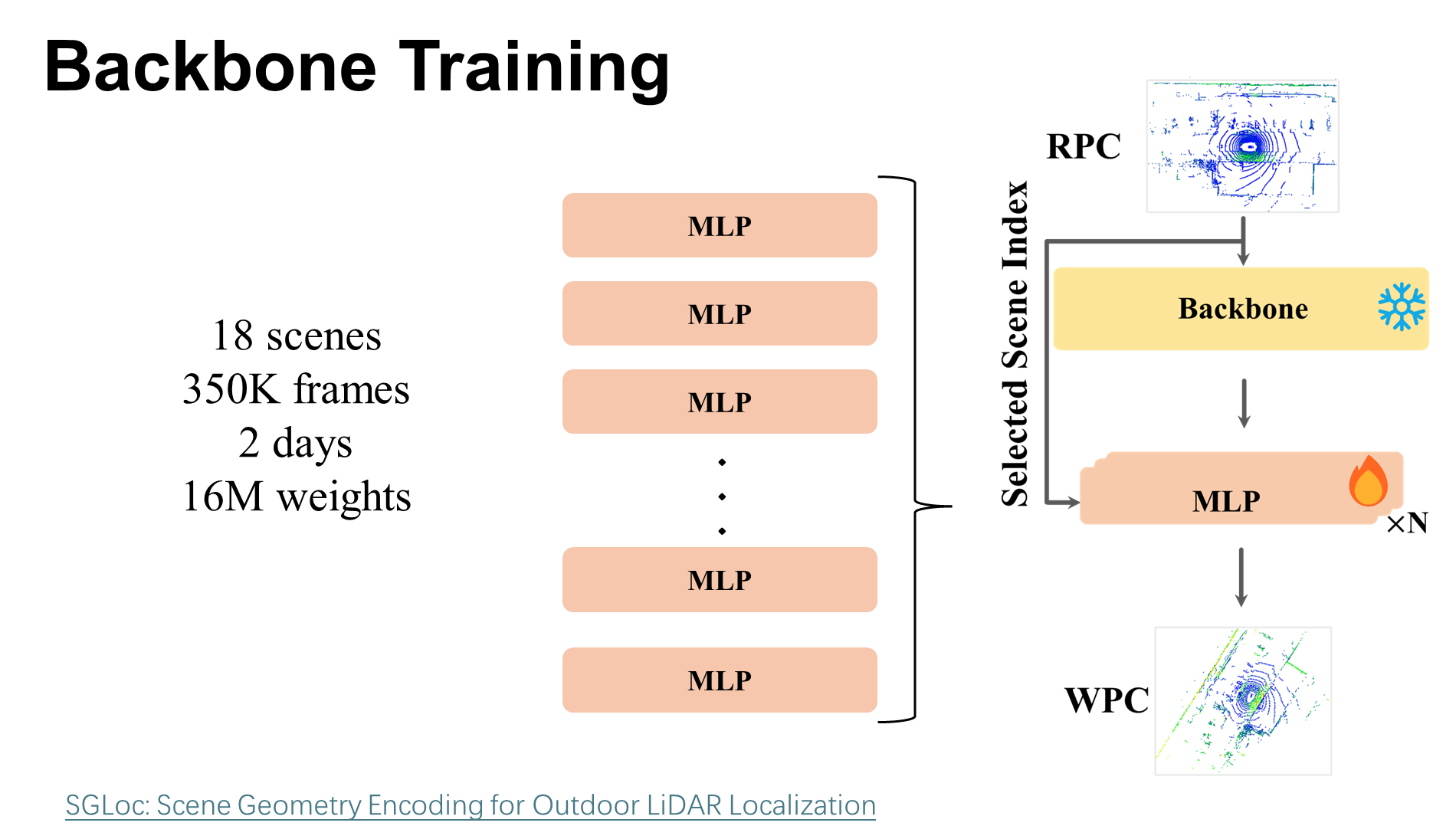
使用多个场景并行训练,得到一个通用的、场景无关的特征提取器。
本文主干采用的是作者之前的工作SGLoc,以最大限度地减少参数数量并缩短训练时间,相应的减少了特征维度和残差层。
然后并行训练 N 个回归头,每个头对应 N 个场景中的一个。这种并行训练策略迫使主干学习在各种场景中有效泛化的特征。
作者是用 nuScenes 数据集 中的 18 个场景上用 350K 帧训练主干 f,训练了 2 天,得到 16M 的权重,可用于为新场景提取描述符。
在获得通用的特征主干后,按照之前的工作 ,冻结了主干网络参数,只训练特定于场景的预测头。
Sample Classification Guidance
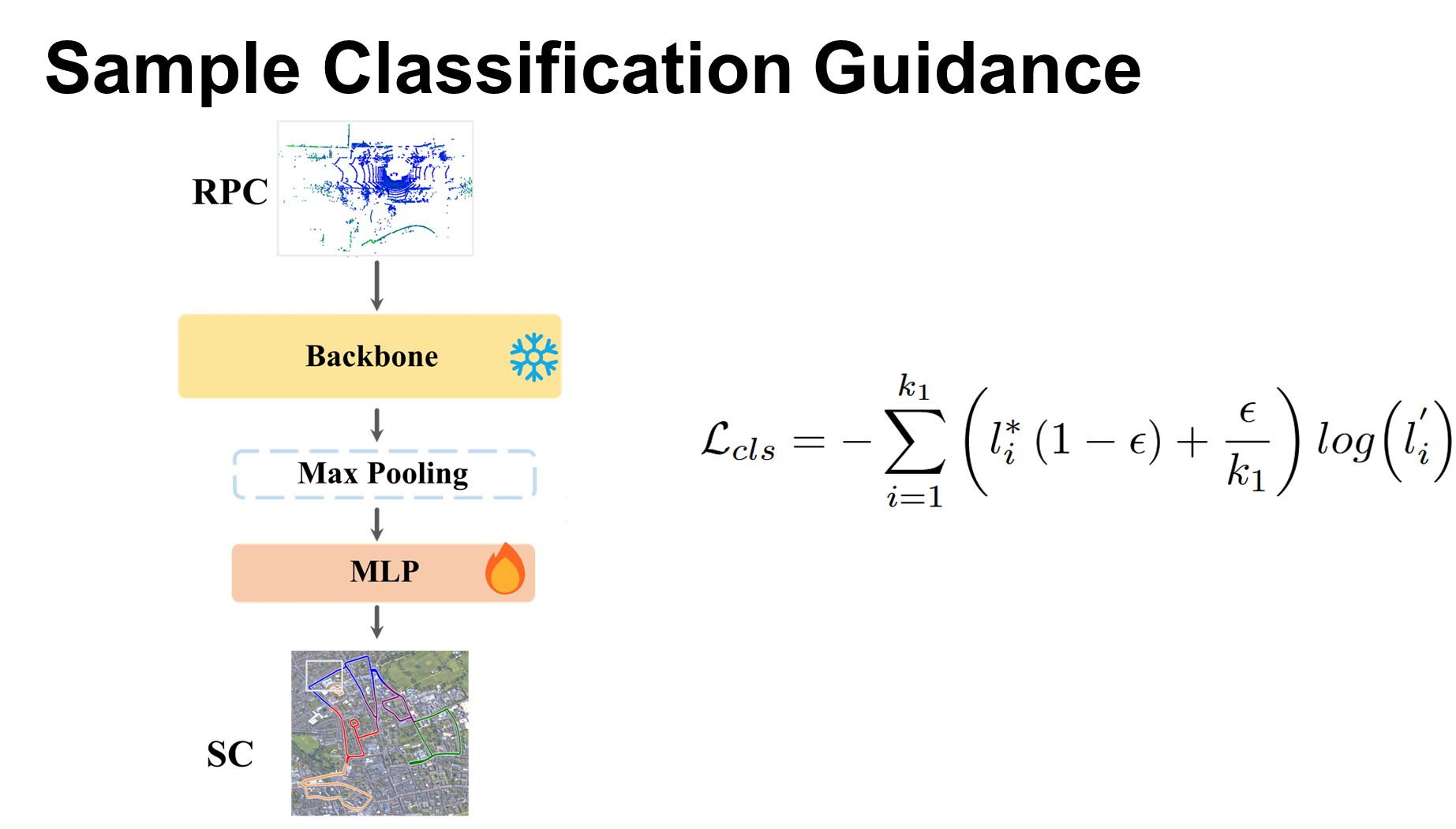
核心思想:与其让网络直接去猜一个精确的坐标,不如先让它搞清楚自己大概在哪个区域。 告诉回归模型:“这个点可能属于哪个区域”,引导其学习相应空间的回归分布
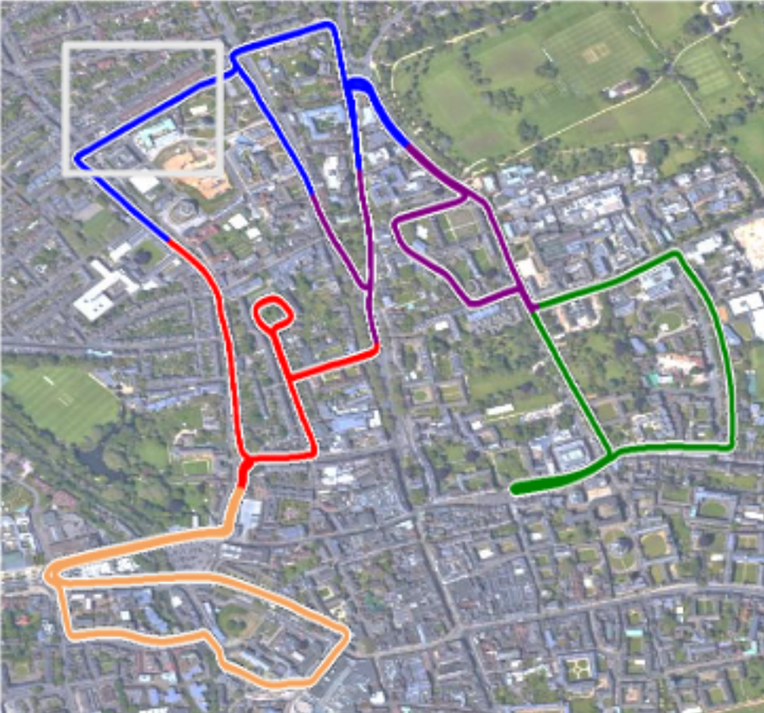
定义标签: 根据点云数据位置信息,使用 K-Means 聚类 将训练样本分成 k1 个簇。标签生成成本低且快。 一是生成标签的成本几乎为零,二是基于位置聚类比基于点云聚类要快得多。
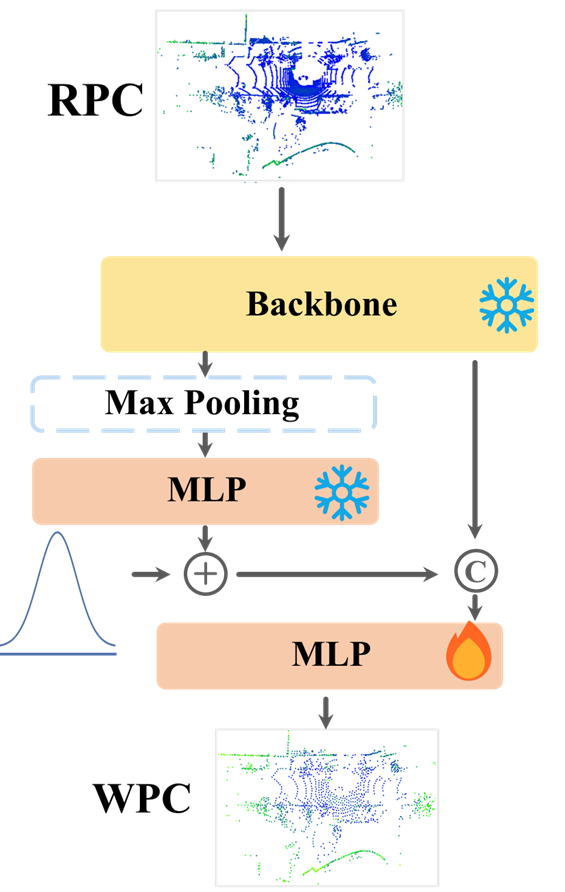
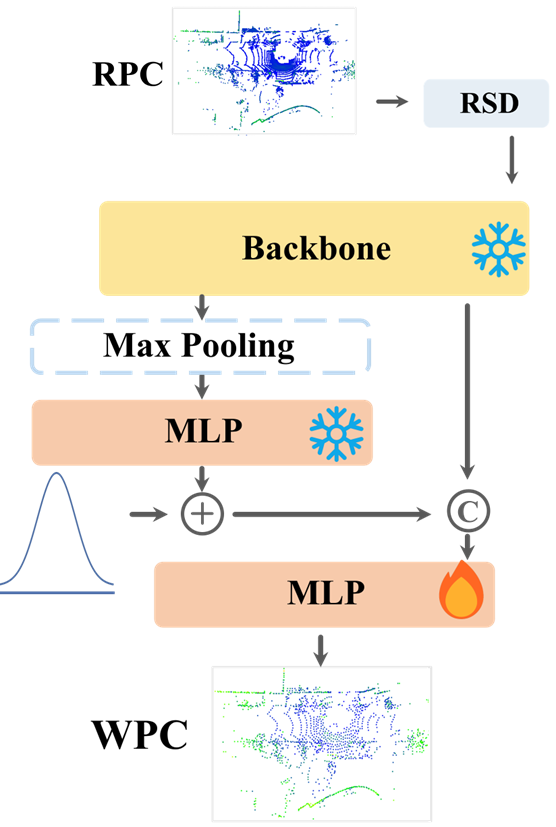
然后冻结好的通用主干网络提取特征,然后做一个全局最大池化(Global max pooling),再接一个MLP多层感知机,输出一个概率分布,表示这个点云属于哪个簇的概率最大。训练这个分类器用的是交叉损失,还加了一个平滑因子ε,防止模型过于自信,有助于提高泛化能力。
将分类得到的概率分布添加噪声 (σ=0.1) 并归一化,再拼接到点云特征中加入SCR训练。 通过SCG技术,网络在学习回归的同时,也得到了一个关于自己所处区域的先验信息,有效引导学习,有助于它更快、更准确地收敛,尤其是在那些视觉相似的区域。
Redundant Sample Downsampling
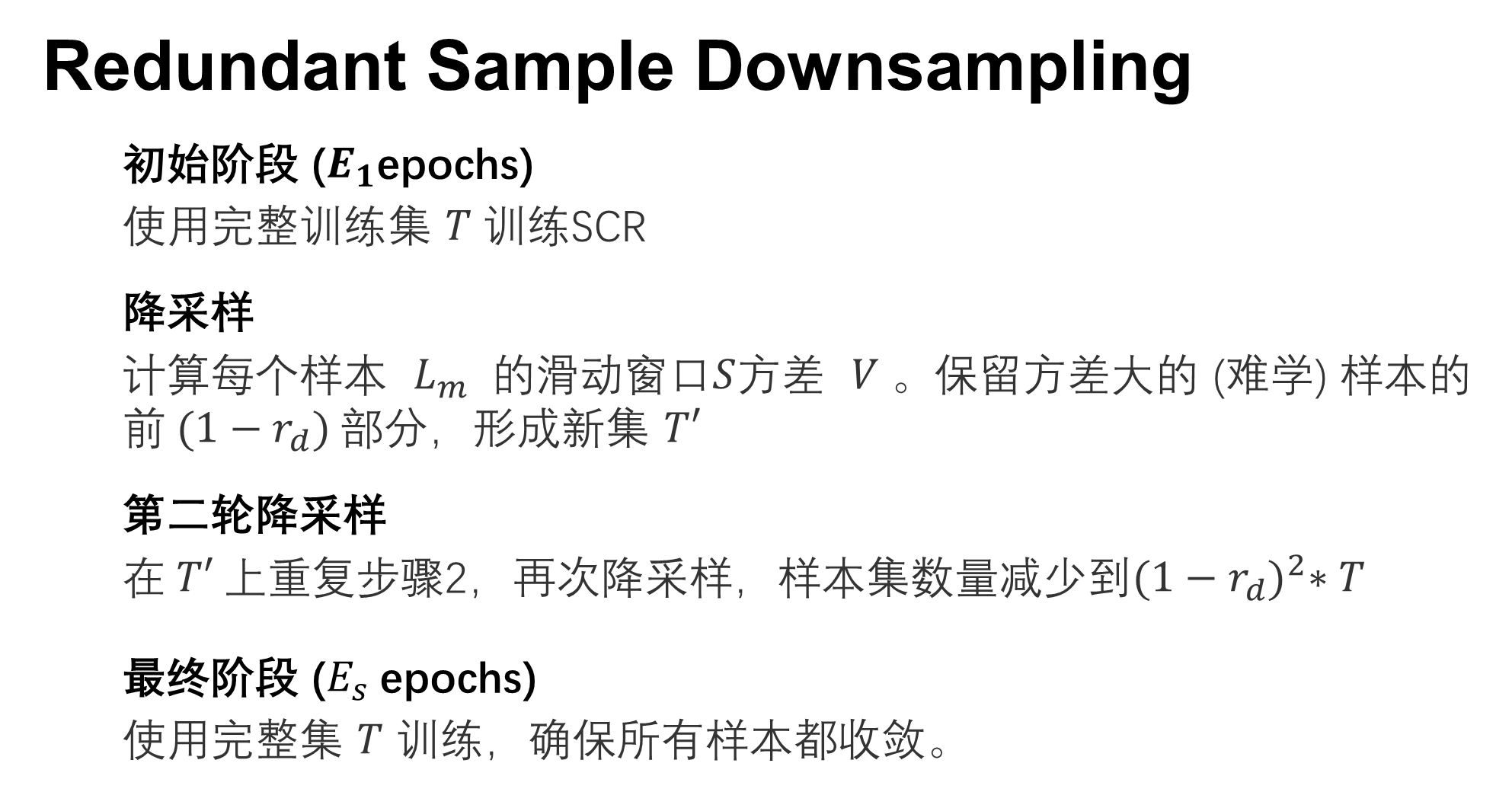
目标: 加速训练,避免在已学得很好的样本上浪费时间
原理: 利用滑动窗口 S内损失 (
激光雷达扫得非常快快,每秒几十上白帧,而且覆盖范围又广,很多地方的数据其实是重复的,有些样本已经被网络学得差不多了,再反复喂给它,不仅浪费时间,还可能让模型陷入局部最优。 所以本文又提出了RSG技术RSD的作用把那些已经学得很好的、没啥挑战性的样本暂时清理出去,让网络可以集中精力去攻克那些难啃的硬骨头
核心思想是利用损失函数的方差来衡量一个样本的难易程度。我们通过计算滑动窗口 S 内
RSD主要分为四个阶段:
Experimental
Experimental Setup
数据集
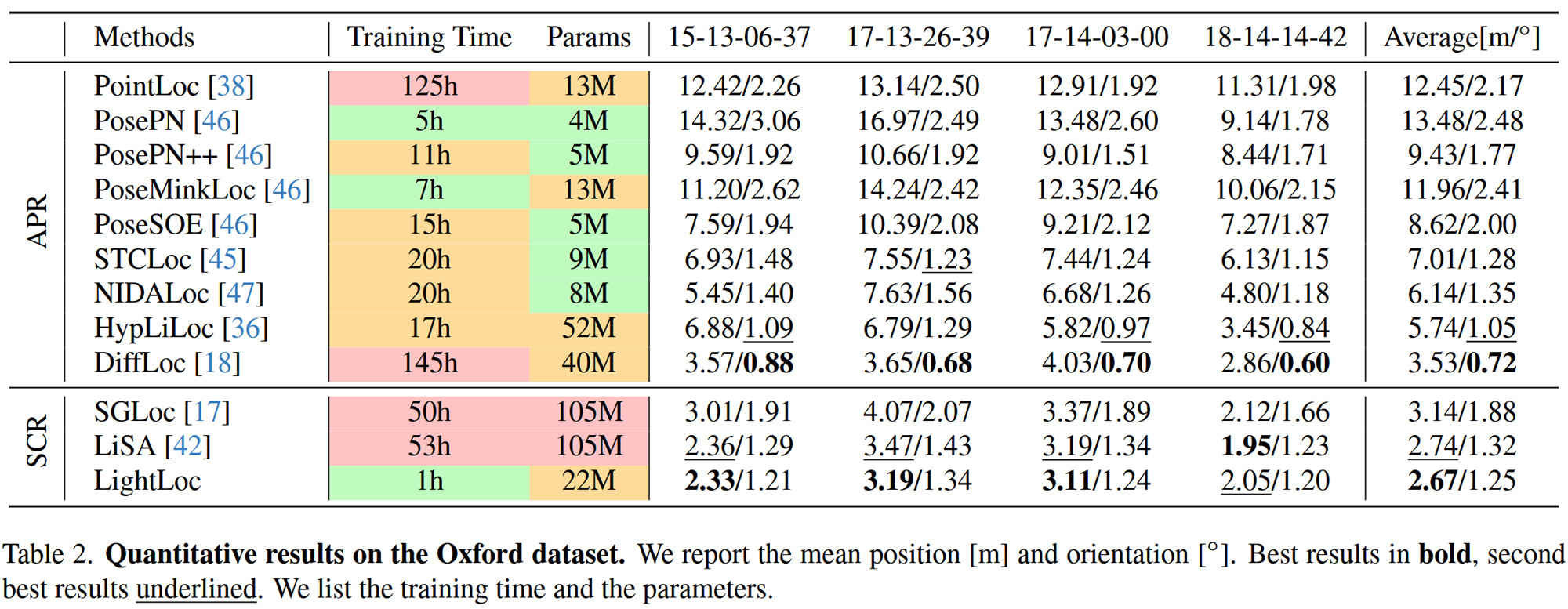
- Oxford Radar RobotCar: 大规模城市环境 (约10km轨迹, 2km²)。
- QEOxford: Oxford数据集的高质量版本 (GPS/INS误差更小)。
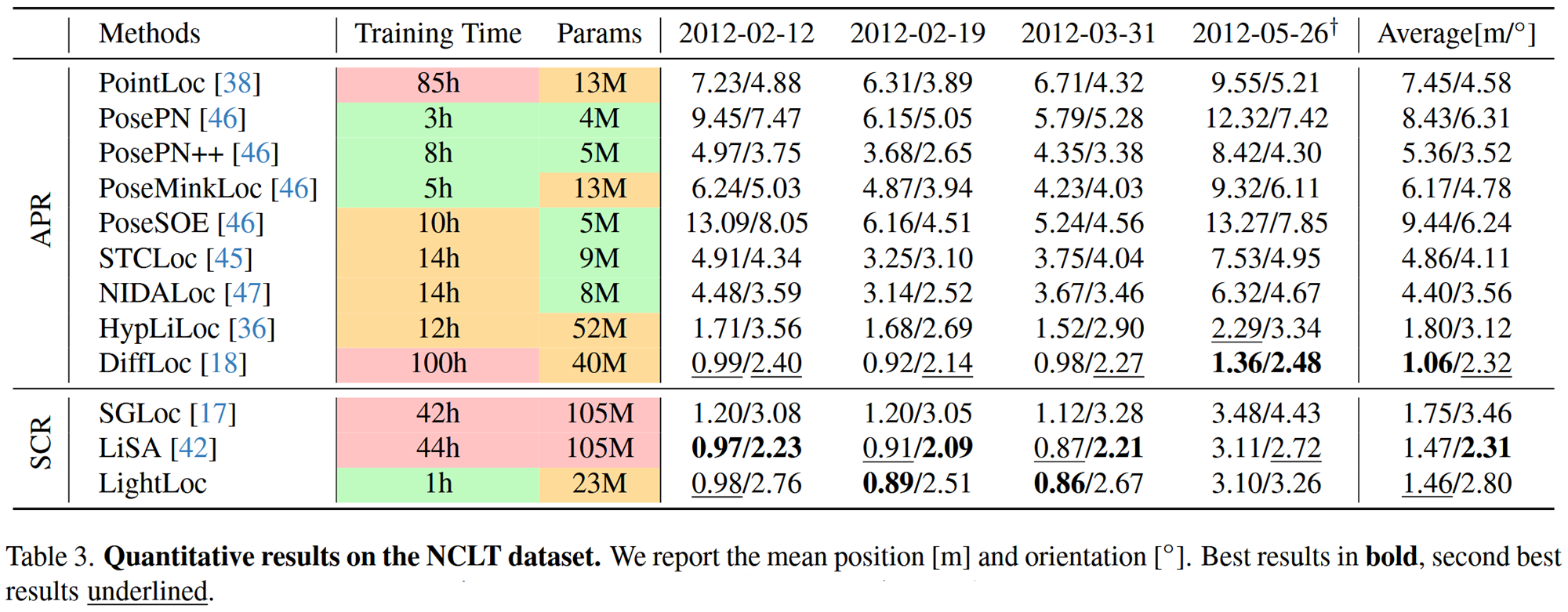
- NCLT: 校园环境 (约5.5km轨迹, 0.45km²),包含室内外复杂场景。
评估指标
- 平均位置误差 (Mean Position Error) [m]
- 平均方向误差 (Mean Orientation Error) [°]
对比方法
- APR (单帧/多帧): PointLoc, PosePN, DiffLoc等。
- SCR: SGLoc, LiSA。
关键参数配置
- SCG: k=25
- RSD: 降采样比r_d =0.25,起始比例 r_st =0.25, 停止比例 r_sp =0.85。
- 训练细节: AdamW优化器, One-Cycle学习率策略。
Comparison with State-of-the-art Methods
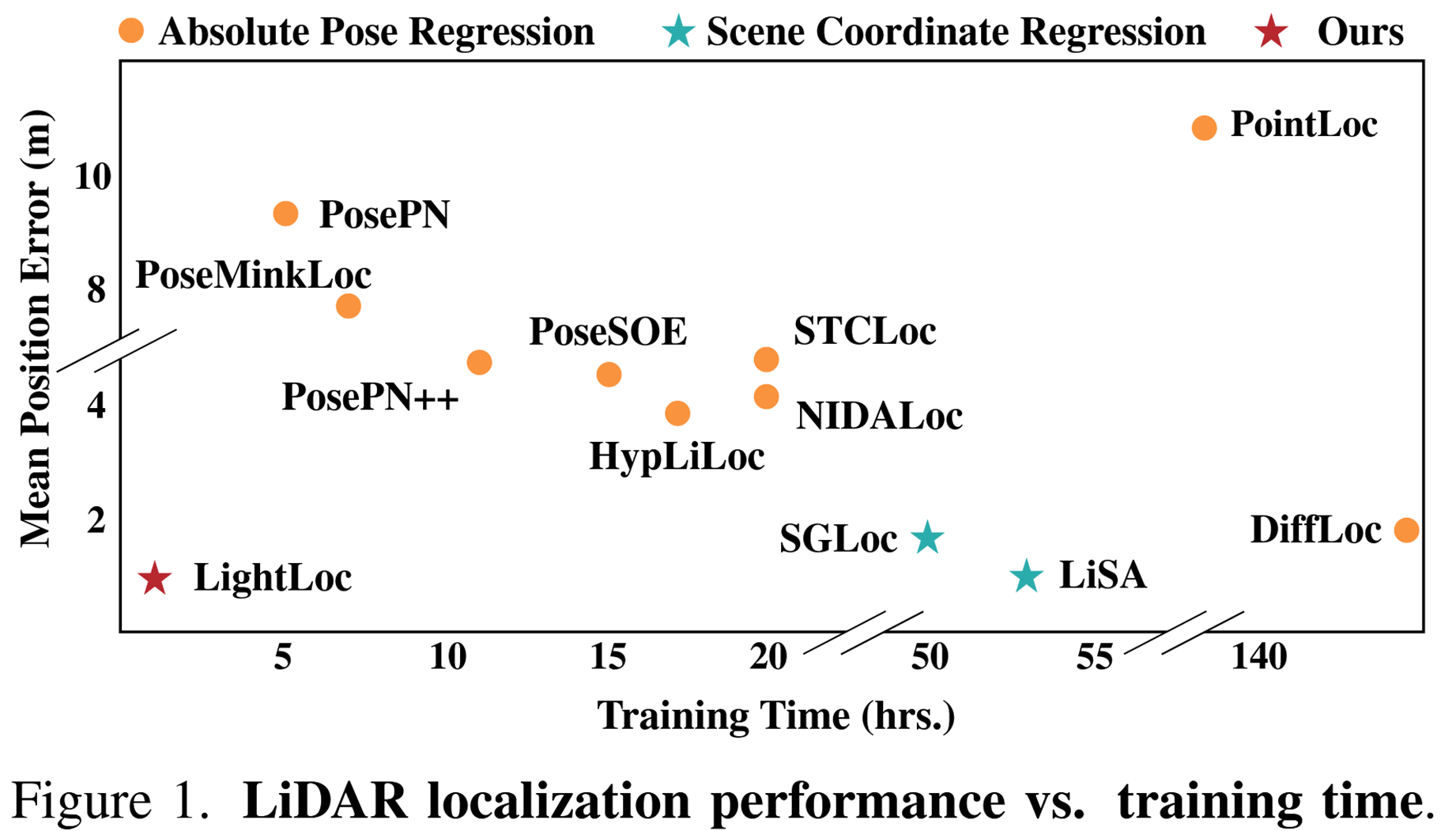
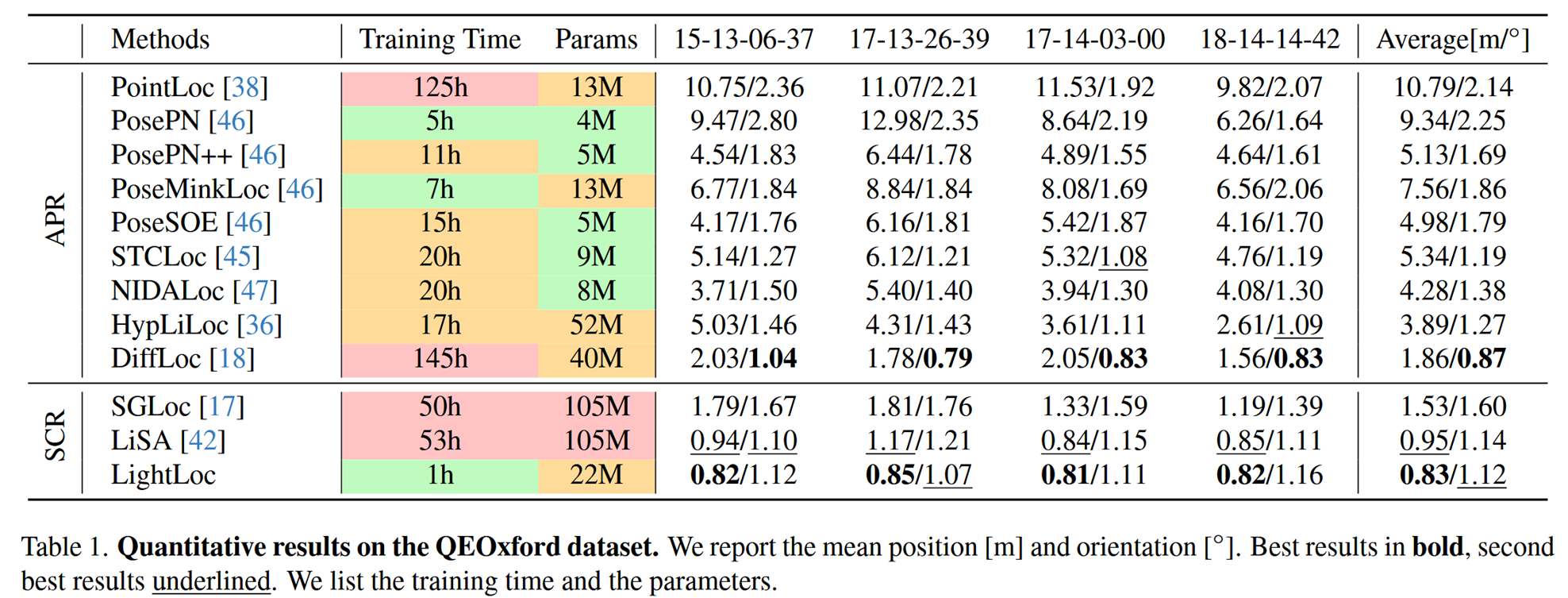
看表格,它的平均位置误差是0.83米,方向误差是1.12度,这两个指标在所有方法中分别排第一第二 训练时间是一小时。 最先进的Lisa方法相比,速度提高了五十倍,参数减少了四倍 再看看DiffLoc,它用了100个小时才训练完,精度也不如LightLoc。 同时LightLoc是单帧输入,而DiffLoc是多帧输入,这意味着LightLoc在实时性上更有优势。 虽然DiffLoc的方向精度更高,但综合来看,LightLoc在精度、效率和模型大小之间取得了非常好的平衡。
再来看原始的Oxford数据集,LightLoc的平均位置误差是2.67米,方向误差是1.25度,位置误差仍然是最好的,方向误差排第三。训练一小时。这说明LightLoc在不同质量的数据集上都能保持其高效性和准确性。
Speed
- Oxford: 平均运行时间 29ms (LiDAR 20Hz)。
- NCLT: 平均运行时间 48ms (LiDAR 10Hz)。
- 满足实时性要求 (< 50ms / < 100ms)。
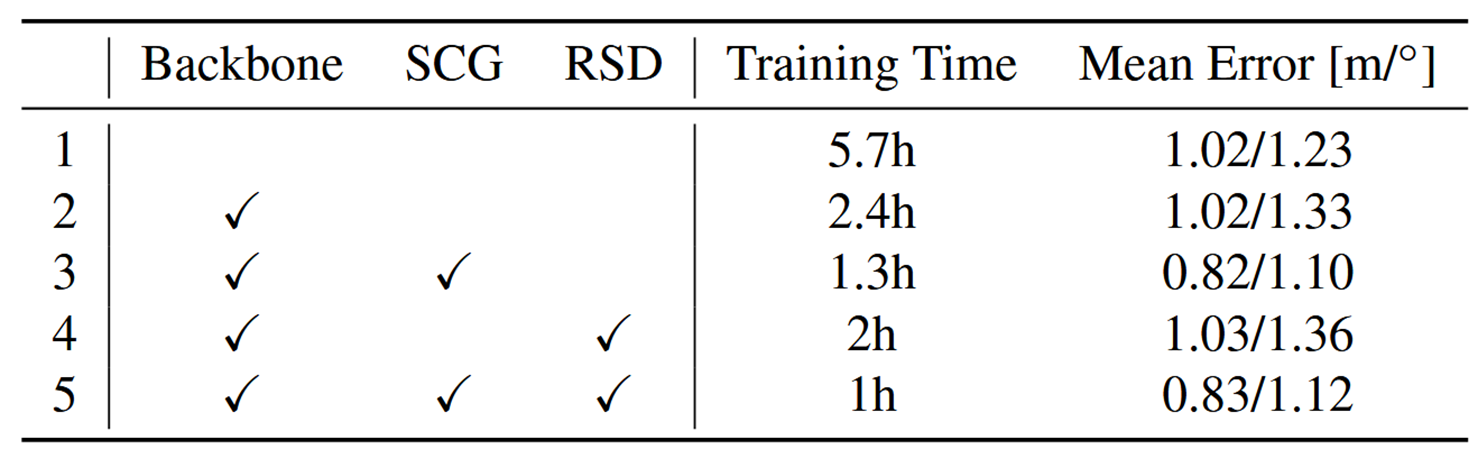
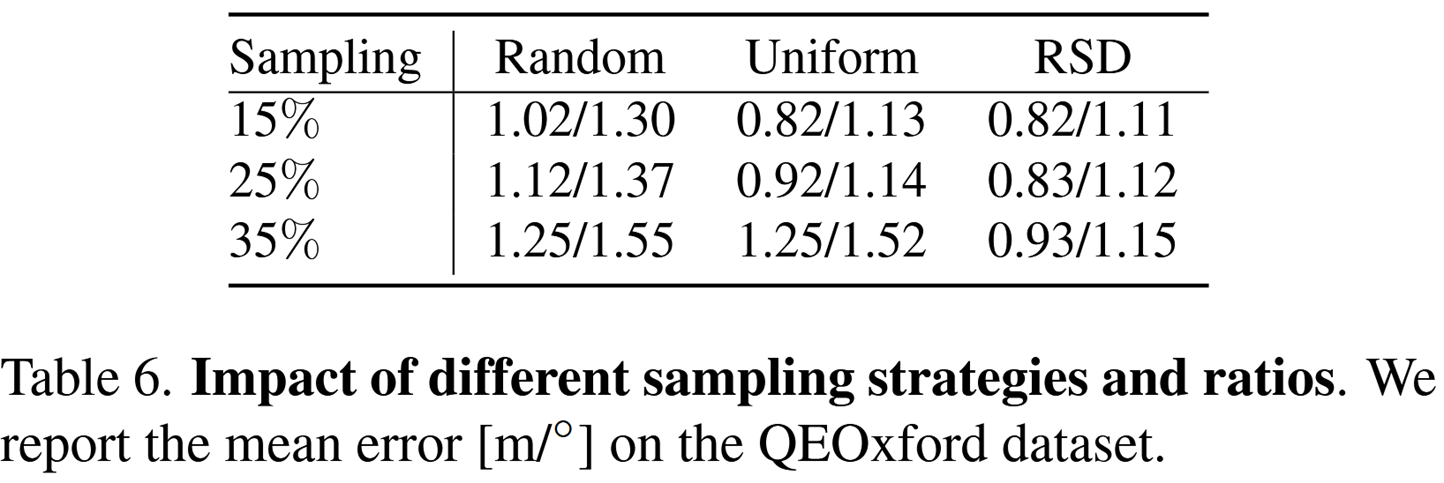
Ablation Study